DC Motor Phidget
30.00 د.ك
Control one high-current brushed DC motor with this powerful Phidget. The encoder input and analog input can enable precise control motor velocity and position.
In stock
Description
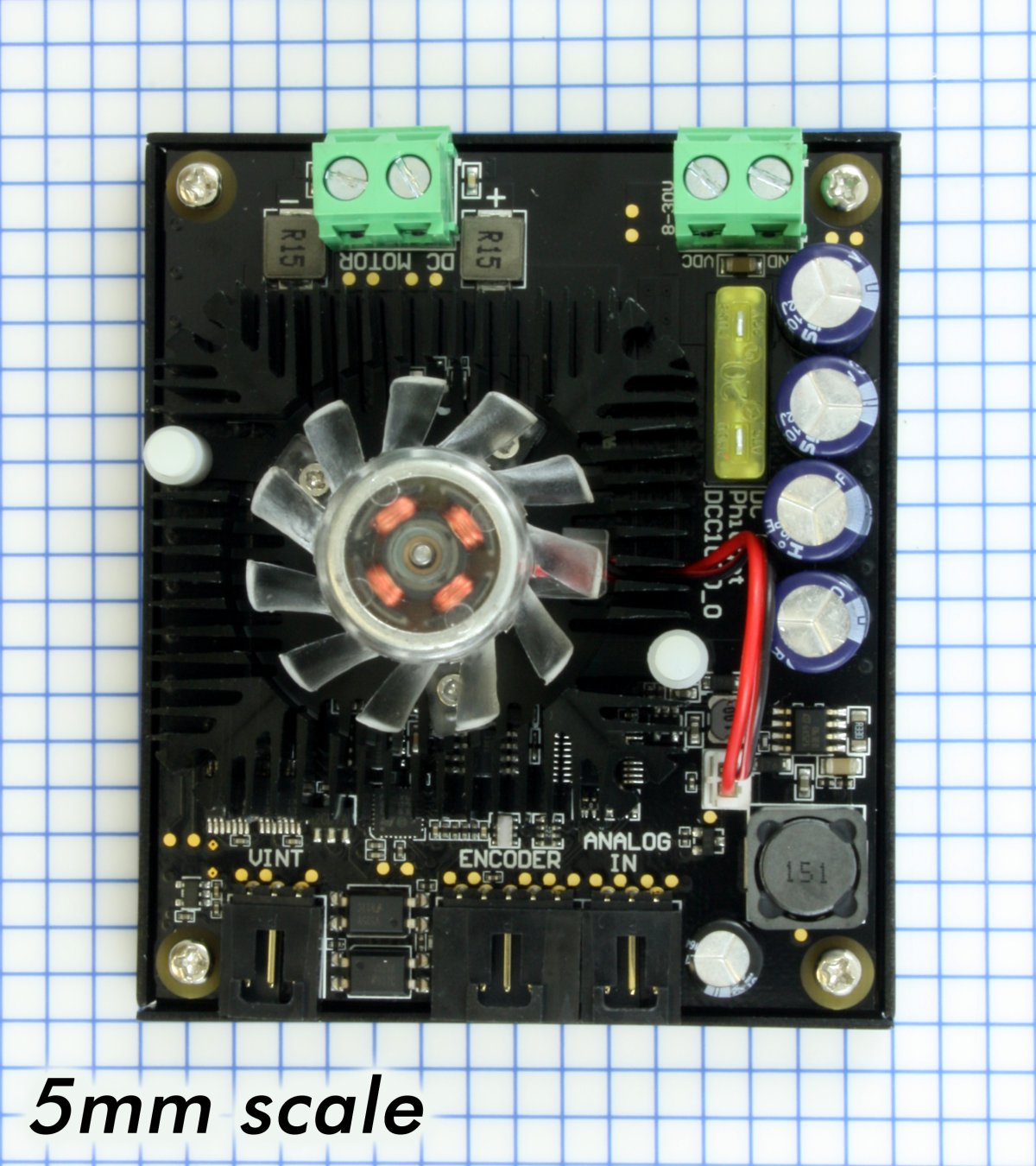
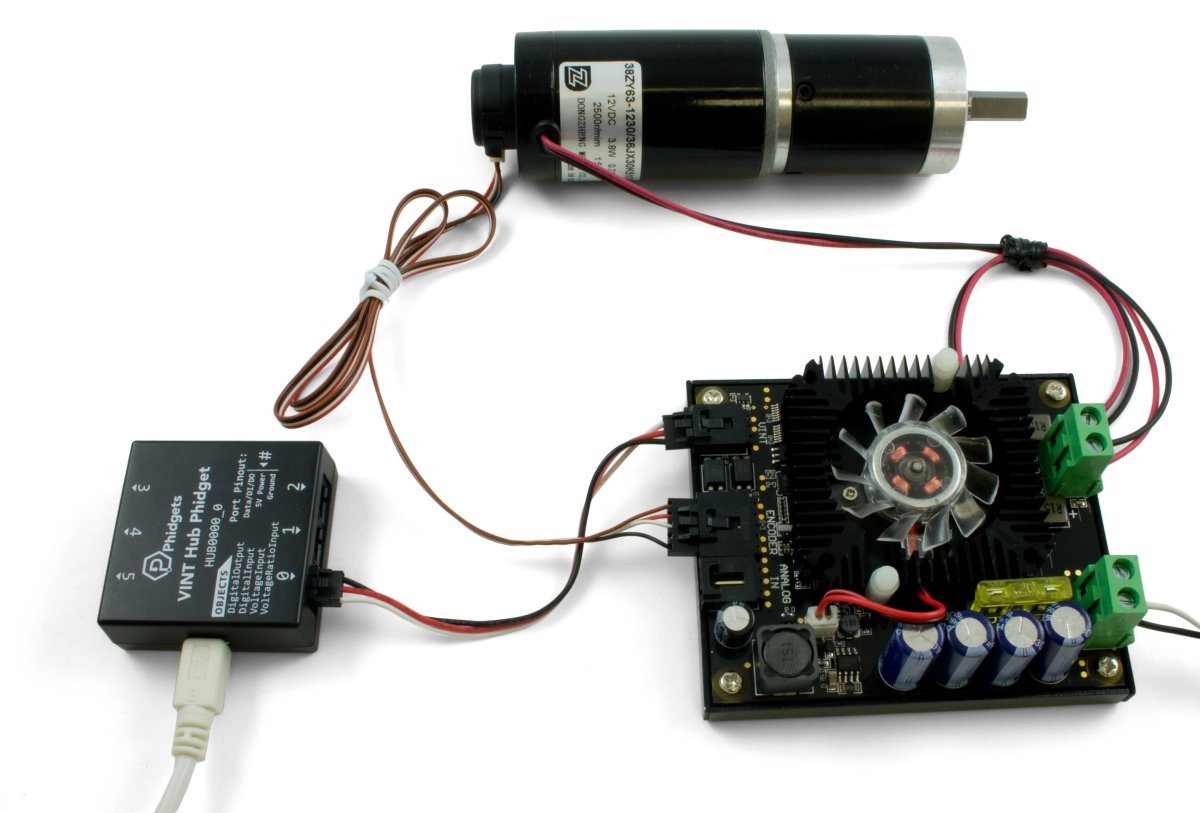
The DC Motor Phidget allows you to control a single DC motor (up to 25 A) or DC linear actuator. It uses high-frequency pulse-width modulation to achieve smooth operation. This Phidget connects to your computer through a VINT Hub.
Features:
- Control velocity and acceleration – Forward and reverse
- Set a specific target position (requires an encoder)
- Monitor electrical current – Detect motor stalling
- Attach potentiometers and other ratiometric sensors – Incorporate position feedback without needing a separate input board
- Encoder input – Read in the quadrature signal from an encoder attached to the shaft of your motor. This lets you make a closed-loop position controller.
- Monitor Temperature – Your program can react to changes in controller temperature.
- Current Control – Limit the motor torque
- Isolation – The VINT port on this device is isolated, improving reliability and eliminating ground loops
- Polarity Protection – The device will not turn on and will not be damaged if the power supply is connected backward
- Overcurrent protection – On-board fuse to protect the controller in an over-current event
- Failsafe Protection – Set the device to turn off automatically if your program becomes unresponsive
Product Specifications
| Board Properties | |
|---|---|
| Controlled By | VINT |
| Voltage Sensor | |
| Number of Voltage Inputs | 1 |
| Sampling Interval Min | 500 ms/sample |
| Sampling Interval Max | 60 s/sample |
| VoltageRatio Input Resolution | 0.00026 |
| Input Voltage Min (DC) | 0 V DC |
| Input Voltage Max (DC) | 5 V DC |
| Measurement Error Max | 0.5 % |
| Sensor Input Impedance | 324 kΩ |
| Controller Properties | |
| Motor Type | DC Motor |
| Number of Motor Ports | 1 |
| Velocity Resolution | 0.001 Duty Cycle |
| Acceleration Resolution | 1 % Duty Cycle/s |
| Acceleration Min | 0.5 % Duty Cycle/s |
| Acceleration Max | 10000 % Duty Cycle/s |
| Acceleration Time Min | 20 ms |
| Acceleration Time Max | 20 s |
| PWM Frequency | 25 kHz |
| Sampling Interval Min | 50 ms/sample |
| Sampling Interval Max | 60 s/sample |
| Current Limit Resolution | 17.9 mA |
| Electrical Properties | |
| Continuous Motor Current Max | 25 A |
| Supply Voltage Min | 8 V DC |
| Supply Voltage Max | 30 V DC |
| Current Consumption (Unconfigured) | (VINT Port) 500 μA |
| Current Consumption Max | (VINT Port) 2 mA |
| Power Consumption (Unconfigured) | 288 mW |
| Power Consumption | motor power plus 700 mW |
| Replacement Fuse | 20A Slow Blow Blade Type, Regular or Micro |
| Encoder Interface | |
| Number of Encoder Inputs | 1 |
| Encoder Interface Resolution | x4 |
| Count Rate Max | 400000 pulses/s |
| Time Resolution | 1 μs |
| Sampling Interval Min | 50 ms/sample |
| Sampling Interval Max | 60 s/sample |
| Encoder Input Low Voltage Max | 800 mV DC |
| Encoder Input High Voltage Min | 2 V DC |
| Temperature Sensor | |
| Temperature Resolution | 0.04 °C |
| Physical Properties | |
| Recommended Wire Size | 10 – 26 AWG |
| Operating Temperature Min | -40 °C |
| Operating Temperature Max | 85 °C |
| Customs Information | |
| Canadian HS Export Code | 8471.80.00 |
| American HTS Import Code | 8471.80.40.00 |
| Country of Origin | CN (China) |
Documents
Product History
| Date | Board Revision | Device Version | Comment |
|---|---|---|---|
| August 2017 | 0 | 115 | Product Release |
| October 2017 | 0 | 204 | Added MotorPositionController support; motor rotation direction was also reversed to be consistent with other Phidget motor controllers and encoders |
| January 2018 | 0 | 205 | Fixed issue with encoder input |
| March 2018 | 0 | 206 | Fixed issue where duty cycle never reached 1.0 |
| April 2019 | 0 | 207 | Fixed averaging of duty cycle when limiting current |
| May 2019 | 0 | 210 | Added failsafe timer functionality |
| February 2020 | 0 | 211 | Fixed saturation warnings triggering at 25A |
| April 2022 | 0 | 220 | Position control math uses doubles instead of floats. Failsafe timer now reset by any successful packet. |